Showing posts with label Robot. Show all posts
Showing posts with label Robot. Show all posts
Wednesday, November 19, 2014
Line Follower Robot Sensor Concept
Line Follower Robot Sensor Concept - Sensor line detector is used in line follower robot is usually based on the principle of light reflectionto distinguish the line with the background color. In the dark color of the light absorption is greater than that of white light reflected to the sensor becomes smaller.
Position sensor to track the trajectory and the example circuit.
| Line Follower Robot Sensor Concept |
Light used for the introduction of the line is usually visible light and infra-red. Sensors for visible light are commonly used are LDR (Light Depending Resistance), while for the infrared light is atransistor and photo diode (photodiode). Sensors placed at the bottom of the frame to hang the robot, so that its position can be located just above the track to be read.
Monday, November 17, 2014
Know the Line Follower Robot
Line Follower Robot Glance - Line Follower Robot- a kind of robot which included into the category robotmobile are designed to work in an autonomous and have the ability to detect and move to follow (follows) the existing line on the surface. Control system used is designed to feel that there are pathways of movement and maneuver in order to remain able to follow that line. Robots of this type quite a lot of interest for those who are just learning to robot technology. Even competitions Line Follower Robot, often held regularly at various universities .In industry, robots of this type is often used to to move goods from one place to another. By modifying slightly the sensor line follower robot can then be developed into a Wall Follower Robot, a robot that can move around the wall.


Sensor On Line Follower Robot
Sensors, can be analogous to the eye of a robot that serves to read the black line of the track robot. So that the robot is able to know when he will turn right, when he turned left and when he stopped. The sensor used is a light sensor mounted below the front of the robot, so as to find a bright line of a dark background or vice versa. Sensors used are usually photo reflector, R LD (Light Dependent Resistor), Photo Diodes and Photo Transistor - mounted on the front two or more under robotline follower. There also are using the camera as a sensor (or image sensor) to a higher-resolution readout line, making more accurate robot motion.The working principle of the sensor is simple, when the transmitter (infrared) emitting light onto a white field, the light will be reflected almost entirely by the white areas. In contrast, Itter m ans when emit light to dark or black areas, then the light will be absorbed by the dark areas, so that incoming light kereceiver low. To be able to read by the microcontroller, the sensor voltage should be adjusted to TTL voltage level that is 0-1 volts for logic 0 and 3-5 volts for logic 1. This can be done by installing the operational amplifier is used as a comparator.
Monday, October 6, 2014
ATmega16 Line Follower Robot circuit diagram
Here the complete electrical circuit diagram of line follower robot which built based on ATmega16. There are three modules of line follower robot circuit that are sensor module, microcontroller module and DC motor module.
ReadMore..
Mainboard (microcontroller + DC motor driver schematic diagram):
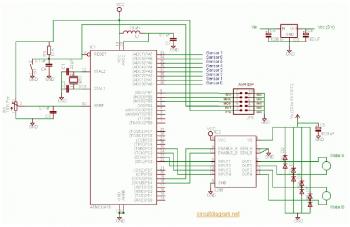
Download the document of ATmega16 line follower robot tutorial for complete tutorial including the working explanation of circuit and program.
Subscribe to:
Posts (Atom)